沈阳自动化所类生命机器人研究取得进展
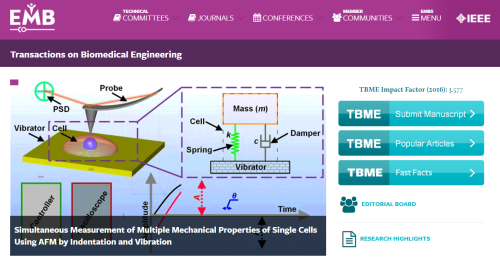
近日,中国科学院沈阳自动化研究所微纳米课题组在类生命机器人领域取得的最新成果,以Simultaneous Measurement of Multiple Mechanical Properties of Single Cells Using AFM by Indentation and Vibration为题,发表在IEEE Transactions on Biomedical Engineering上。
类生命机器人是机器人领域的前沿方向,是将生命体与传统的机电系统有机融合,形成的一种新的类型机器人系统。类生命机器人具备生命体与传统的机电系统的各自优点,如生物体的高能量转换效率、本质安全性,以及机电系统的高强度、高重复性等特点,有望解决制约机器人发展的能源供给、驱动控制、作业灵活性等问题,吸引了全球众多科学家的研究兴趣。尽管经过不断发展,类生命机器人已取得一定成果,但由于缺乏对驱动细胞的多维机械特性同步检测技术和理论研究,类生命机器人的运动控制、动力学匹配等问题依然是当前面临的关键挑战。
针对上述问题,沈阳自动化所微纳米课题组提出了一种基于受迫振动理论的单细胞多维机械特性同步获取技术。采用振动基底与原子力显微镜相结合的方法,分别获取基底与细胞受迫振动的动态曲线。根据受迫振动理论对动态单细胞进行机械动力学建模,从而根据所测得的动态曲线辨识理论模型中的未知参数,获得单细胞的多维机械特性。
由于原子力显微镜具有对生物样本无损检测的特性,同时采用基于受迫振动理论的测量方法,可实现单细胞的粘性、弹性、质量多维机械特性的原位无损同步获取,为以细胞为驱动单元的类生命机器人的动力学匹配及控制方法研究奠定技术基础。
沈阳自动化所微纳米课题组专注于纳米技术、生物技术与机电系统的融合,期望利用新的物理和生物原理,实现机器人感知、驱动和控制性能的提升。课题组先后在Small、ACS Applied Materials & Interfaces、Lab on a Chip、Nanoscale、IEEE Trans等期刊上发表论文。课题组研究布局逐步系统化、体系化,为未来取得更好的成果奠定了基础。
论文链接
沈阳自动化所类生命机器人研究取得进展
标签:
相关资讯
2、如涉及作品内容、版权和其它问题,请在30日内与本网联系,我们将在第一时间作出适当处理!有关作品版权事宜请联系:+86-571-88970062