英国WEST温度控制器
偏差信号以阴影部分表示,超调部分为了表示得更清楚而作了夸大处理,自适应计算方法在计算 PID参数之前,会监视一个完整的偏差震荡,如果震荡连续出现就重新计算 PID 参数,从而使控制器能够快速达到的控制参数,如果控制器被关闭,最后的 PID 数据将继续保存在控制器防丢失的存储器中而不会丢失,在下一次启动时,该组数据将作为初始数据使用,但存储的默认数据不一定总有效,比如控制器换成了新产品,或者具体使用条件发生了变化,在这些情况下,用户可以使用自整定(Pre-tune)功能来建立新的初始值。
在实际应用中,连续地使用自适应功能也是不合适的,这样会频繁地造成人为的负载扰动,比如炉门很有可能打开时间经常过长等等。
电动阀门驱动控制器中的自适应功能总是将微分设置为 0(OFF),因在这类应用条件下,通常不需要微分操作。
如果一台控制器设定成 On-Off开关控制模式,自适应功能就不能工作。
同时参见最小电机通电时间,自整定,On-Off开关控制,PID和调整。
 自锁继电器(Latching Relay) 术语种类:基本定义
自锁继电器(Latching Relay) 术语种类:基本定义
是一种特殊的继电器功能,一旦受到触发后,如果要解除触发动作,必须有一个复位信号;在限值控制器和数显表的报警功能中都有这种输出,为了成功复位已自锁的继电器的状态,必须首先解除引发继电器动作的报警信号或限值条件,然后再使用复位信号,这个信号可以从仪表控制盘、数字输入端口上发出,或使用串行通信指令。
同时参见报警动作,数显表,限值控制器,限值滞后,串行通信。
自整定 (Pretune) 术语种类:控制器说明
West 的自整定功能通过对启动阶段的人为干预,在到达设定点之前得到 PID的近似值,在自整定过程中,控制器的主控输出全功率开启让过程值上升到设定点与初始过程值中间大约一半的位置,到达该点后,关闭主控输出(或者辅控输出全功率开启,用于双控制输出),过程值因而产生震荡,在跳过震荡的峰值之后,自整定功能会自动计算出近似的 PID 参数,比例带、积分时间和微分时间,此过程如下图所示。
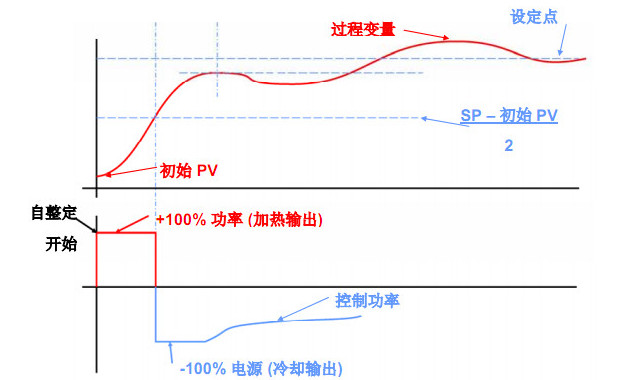
自整定完成后,控制器自动使用新的 PID参数计算控制输出。
如果是新安装的控制器,或者过程应用有所变化,进行一次自整定可以基本避免过冲。
自整定是一次性操作,完成后系统将自动脱离自整定状态,但也可以通过”自动自整定”参数将其设置为每次上电即运行。
电动阀门驱动控制器上的自整定功能总是将微分设定在 0 (关闭),因为在这类应用条件下,通常不需要微分操作。
在以下情况下,无法启动自整定:
1. 控制器的主控输出或辅控输出被设为 On-Off开关控制
2.过程与给定值的偏差小于量程的 5%
3.启用了设定点斜坡.
同时参见自动自整定,自动重置,控制类型, On-Off开关控制,输入范围,PID,主比例带,过程变量,速率,辅比例带,自适应,设定点,设定点斜率,调整和电动阀门驱动控制。
最小电动机运行时间(Minimum Motor on Time) 术语种类:VMD控制器参数
在阀门开始处于静止的条件下,该值定义了启动阀门所需的最小驱动时间,该值主要用来保证控制器的驱动作用能够克服阀门的摩擦力和惯性作用。
如果自适应是off(关闭),可通过此参数影响阀门的动作,数值大,阀门动作减少,但工艺参数有可能出现震荡,自适应可以监控阀门的动作并自动将其调整到最小值。
这个数值太大的话会削弱除自适应的效果,如果自适应运行时过程变量一直震荡,那么多半就是这个原因。
显示代码=, 默认设置=
。
同时参见电动机运行时间,自适应和电动阀门驱动控制器。
DC线性性能:
辅助输入
数字输入:
5、输出模块技术规格
输出模块类型:
输出类型的技术规格:
详情请见:英国WEST温度控制器
DC线性性能:
辅助输入
数字输入:
5、输出模块技术规格
输出模块类型:
输出类型的技术规格: